Welcome to our store!
Overview This product is a bus servo control board based on ESP32. It provides routines that can control bus servos through the WEB terminal, and supports programming of servos to change the ID and working mode of the servos (servo mode/motor mode), etc. ,
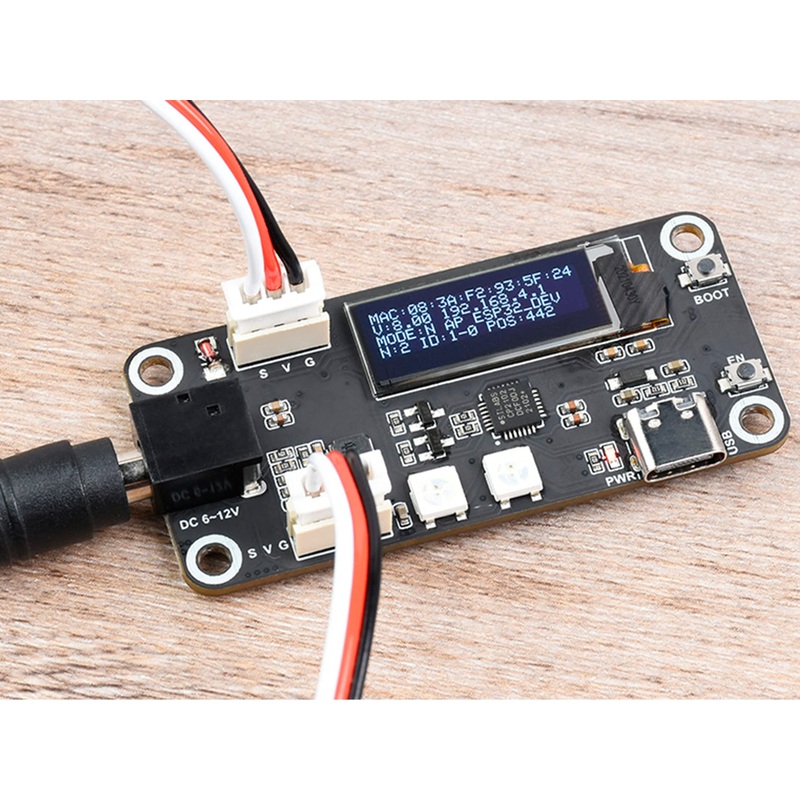
Overview This product is a bus servo control board based on ESP32. It provides routines that can control bus servos through the WEB terminal, and supports programming of servos to change the ID and working mode of the servos (servo mode/motor mode), etc. , in theory, it can control 253 bus servos and read the current angle, load, voltage, mode and other information of each servo, and can use the serial port to communicate with the upper computer, which is used to build the lower computer of the robot project, and the on-board OLED The screen can be used to display key information and is suitable for robot projects such as robotic arms, hexapod robots, humanoid robots, wheeled robots, etc. that require feedback on the angle and load of the steering gear. Specifications Supply voltage : DC 6-12V Power supply connector : 5.5 2.1mm DC Download interface : Type-C Controller: ESP32 Control interface : UART Dimensions : 30 65mm Mounting hole size: 2.75mm Mounting hole spacing :23 58mm Application examples Servos will provide various feedback like position, speed, torque lock, operating mode (servo mode, servo motor mode, etc.) for advanced projects requiring closed-loop automatic control Ideal choice for building quadruped robots, hexapod walkers, robotic arms and other robotic projects requiring multiple servos Online Development Resources /User Manuall:// bit.ly/3JK3kev PACKAGE CONTENT Servo Driver with ESP32 x1 Screws pack x1




Reviews
There are no reviews yet.